👉 Ara et toca a tu!
Et proposem uns reptes amb Crumble.
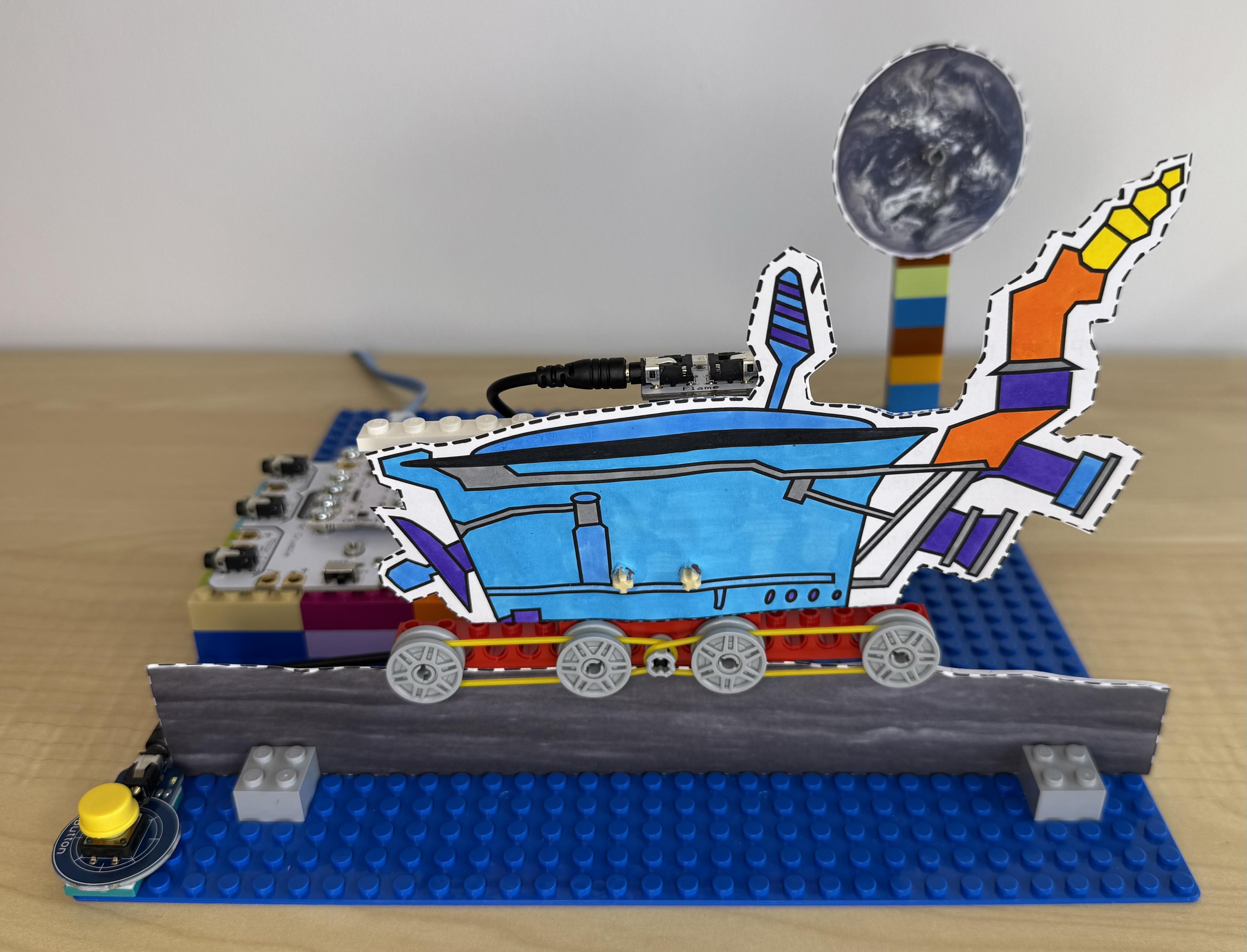
Lunojod 1
El 1970 la Unió Soviètica va dur a terme un dels projectes més importants i menys coneguts. Va enviar a la Lluna el primer vehicle d'exploració teledirigit des de la Terra: Lunojod 1.
Amb CrumbleJunior, dissenyaràs el teu propi explorador lunar Lunojod 1, en què integrarem una llum que simuli el reactor nuclear i un motor que mogui les rodes quan tu li ordenis.
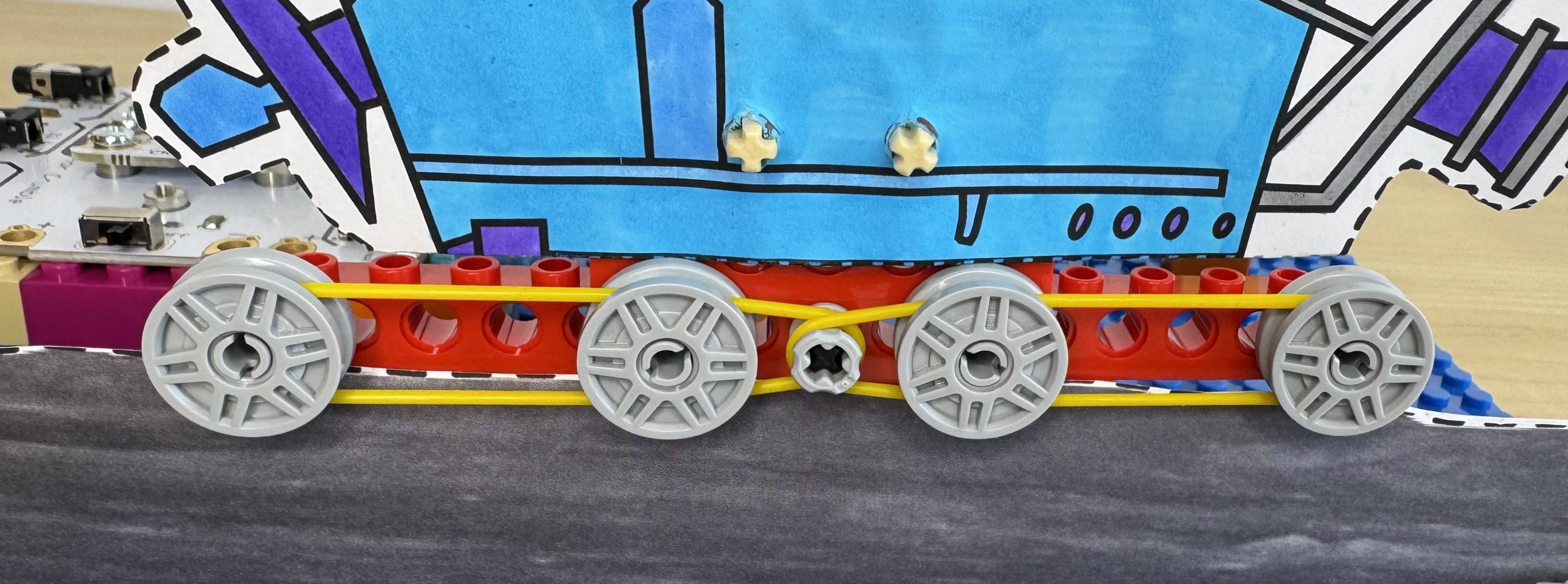
1️⃣ Construeix una reproducció de Lunojod 1. Utilitza les següents imatges per construir-ho tot abans de programar.
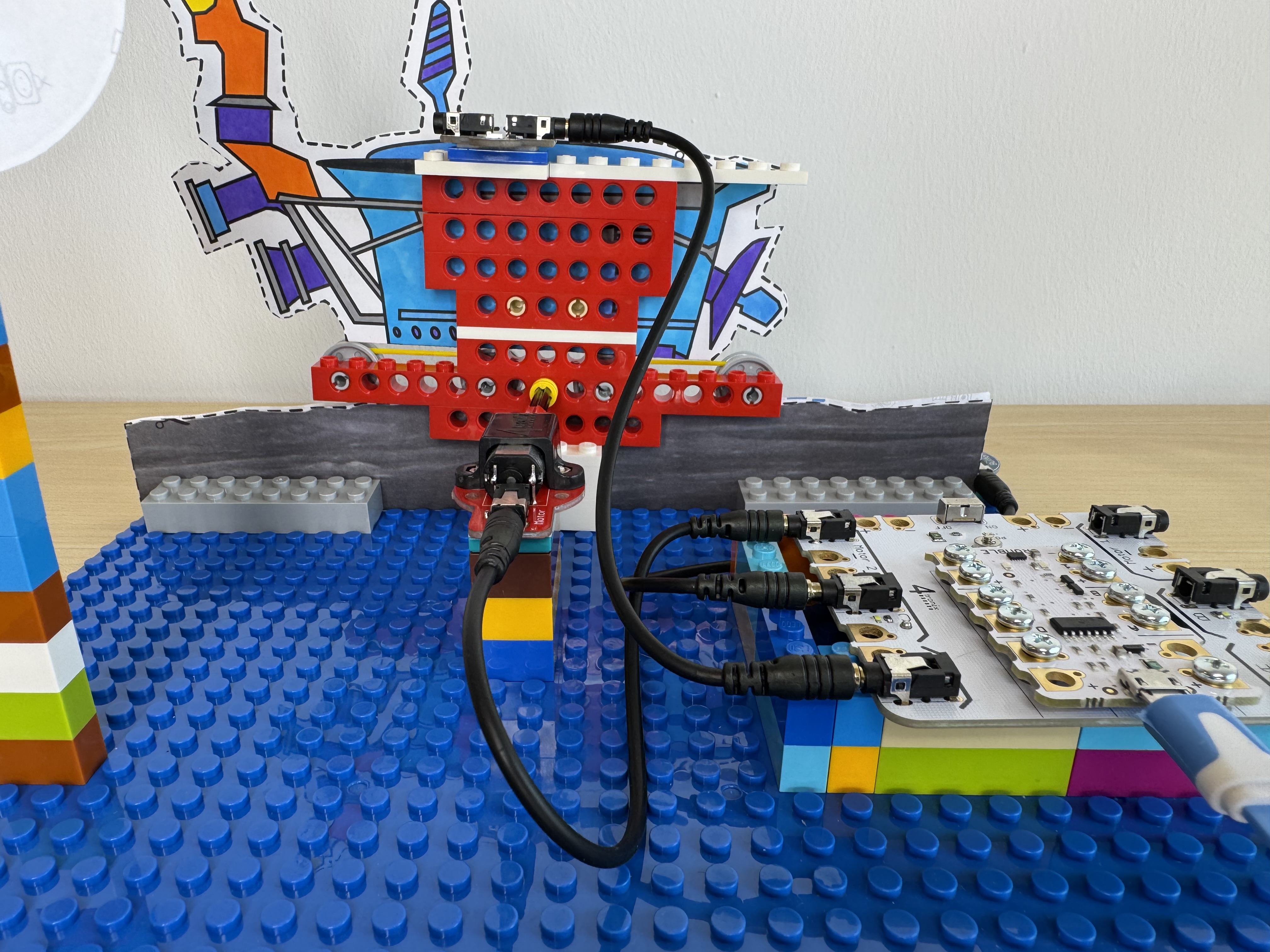
2️⃣ Connecta i programa. Connecta el motor al port Motor 2, el polsador (BUTTON) al port C i l'Sparkle (FLAME) al port D. Copia aquest programa al teu ordinador i carrega'l a Crumble Playground.
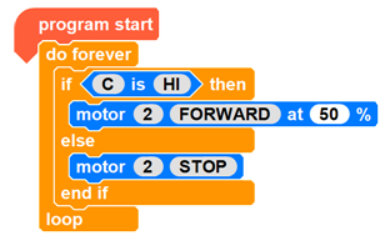
3️⃣ Posa en funcionament el Lunojod 1:
- Lunojod 1 es mou a diferents velocitats. Programa que, en prémer, el motor avanci ràpidament. Quan no premem avançarà a poc a poc.
- Programa que, en prémer, Lunojod 1 avanci i quan no ho premis retrocedeixi. Tria la velocitat que vulguis.
- Lunojod 1 parava durant la nit, es tancava i utilitzava el seu reactor per escalfar-se. Programa que, quan prems, Lunojod 1 avanç i l'Sparkle s'apagui. Quan no prems, el motor haurà de parar-se i l'Sparkle s'encén d'un color que sembli radioactiu.
- Quan volem programar temps molt petits i precisos utilitzem els mil·lisegons en comptes dels segons. Un segon són 1000 mil·lisegons. Programa que, quan prems, el motor avanci i l'Sparkle s'apagui. Quan no prems el motor haurà de parar-se i l'Sparkle parpellejar molt ràpidament.
- Programa que quan prems Lunojod 1 avanci a poc a poc i el Sparkle parpelleja a poc a poc amb el color que vulguis. Quan no prems el motor haurà de parar-se i l'Sparkle parpellejar de pressa amb un altre color diferent.
El teu primer dia a l'autoescola
En aquest repte, gaudiràs de les teves primeres classes a l'autoescola robòtica. Aprendràs a programar els motors de MiiBot per aconseguir que executi els seus primers moviments. Amb una mica de pràctica, obtindràs el carnet de conductor de robots!
1️⃣ Munta el teu robot.
2️⃣ Construeix els obstacles d'entrenament. Per indicar diferents posicions al teu recorregut, necessitaràs diversos cons de trànsit. Pots utilitzar les peces retallables per construir dues piràmides que actuïn com a obstacles (pàgina 29 del llibre El robot STEAM que aprende contigo). Decora-les com més t'agradi.
3️⃣ Situa MiiBot al tauler. Per dur a terme les diferents proves d'aquest repte, farem servir la cinta mètrica del camp de proves Complubot. Situa MiiBot al costat de la línia de 0 cm.
4️⃣ Fes córrer MiiBot:
- Situa el robot a la marca de 0 cm i una piràmide dona 15 cm. Programa que el robot avanci fins a ella el més ràpid possible i s'aturi just abans de xocar-se.
- Situa el robot a la marca de 25 cm i una piràmide a la marca de 0 cm. Programa que el robot retrocedeixi ràpidament i s'aturi abans de xocar-se.
- Situa el robot al començament de la cinta i col·loca una piràmide a 30 cm. Programa que el robot avanci fins a ella sense xocar-se i retrocedeixi fins a aturar-se al costat de la marca de 10 cm.
- Situa el robot a la línia central al costat del centre del quadrat. Programa que giri 180° cap a l'esquerra i s'aturi amb les dues rodes sobre la línia.
- Situa una piràmide al costat del robot i una altra davant seu. Programa que l'esquivi amb un moviment de 90° a la dreta i un altre de 90° a l'esquerra.
- Situa el robot després de la línia central del quadrat. Programa que avanci, gireu 180° i torneu a avançar, fent que s'aturi quan hagi superat la línia.
Un robot repartidor
Aquest repte consistirà a programar un robot repartidor de paquets a domicili. Afegirem el polsador amb què indicar a MiiBot quan començar o acabar les seves tasques.
1️⃣ Munta el teu nou dispositiu. Quan hagis afegit el polsador al robot, connecta'l amb un cable al port B.
2️⃣ Construeix els punts de lliurament i recollida. Construirem dos cilindres per obtenir dues bústies de correus. Seran els nostres punts de lliurament i recollida de mercaderies. Pots retallar-los de la pàgina 29 del llibre El robot STEAM que aprende contigo. Decora'ls abans de muntar-los.
3️⃣ Situa MiiBot al tauler. Igual que al repte anterior, la majoria de les proves que realitzarem se situaran sobre la cinta mètrica del camp de proves. Al costat hi situarem les bústies de correus.
4️⃣ Fes córrer MiiBot:
- Situa el robot després de la línia de 0 cm. Programa perquè esperi que premsis perquè avanci 60 cm i s'aturi.
- Situa el robot al costat d'una bústia a la línia de 40 cm. Programa que quan prems retrocedeixi 40 cm i torni a la seva posició inicial.
- Situa el robot a la línia inicial i col·loca una bústia a 20 cm i una altra a 40 cm. Programa perquè espereu que premeu per avançar i aturar-vos al costat de la primera bústia. Passats uns segons haurà d'avançar i parar al costat de la segona bústia.
- Situa el robot a la línia de 0 cm i una bústia a 20 cm i una altra a 40 cm. Programa perquè el robot avanci 20 cm i retrocedeixi 10 cm contínuament. Entre cada acció heu d'esperar aturat que premeu per executar-la.
- Programa que el robot recorri el quadrat exterior del camp de proves. Heu d'alternar contínuament el moviment d'avanç o el gir de 90°. Després de cada moviment s'ha d'aturar i esperar que premsis per passar a la següent acció.
- Situa el robot i una bústia a la marca de 50 cm. L'objectiu serà acabar el recorregut tan a prop com sigui possible de la bústia. Programa que el robot canviï entre avançar i retrocedir cada vegada que pressions el polsador. Repetiu aquesta seqüència tres vegades. Després s'haurà d'aturar. Prova diferents potències d'avenç i reculada (100%, 75%, 50% i 25% per exemple) i anota a quina distància acabes de l'objectiu després de cada prova.